


(547 MB) 00:48:27
2016-06-19 10:00 🛈Bild: https://www.adlerweb.info/blog/wp-content/uploads/2016/06/cover-1-300×169.jpgPOV-Anzeigen sind immer ein Hingucker: Durch die Trägheit des Auges zaubern rotierende LEDs scheinbar magisch ein Bild in die Luft. Mit dem „Cross LED Dot Matrix Display Circuit Board Rotating Electronic Kit“ bietet Banggood ein solches Kit für aktuell weniger als 10€ an – ein Preis zu dem man kaum die Bauteile einzel kaufen kann. Mit einigen ungewöhnlichen Kniffen wie LEDs, welche auf der Kante der Platine montiert sind, oder einer drahtlosen Stromübertragung per Spulen zwischen Gehäuse und dem rotierenden Teil des Aufbaus fällt der Bausatz hierbei gleichzeitig in die Kategorie „mal was Neues“. Klingt zu schön um Wahr zu sein? Es gibt einen kleinen Haken: Das Kit ist nicht als klassischer Bausatz zu betrachten sondern erfordert vom Erbauer etwas Eigenleistung. Eine kleine Schaltung muss „fliegend“ anhand eines Schaltplans aufgebaut werden und der verwendete Mikroprozessor wird ohne Software ausgeliefert. Für letzteres finden sich im Netz inzwischen jedoch passende Vorlagen, sodass für die Inbetriebnahme ein USB-TTL-Adapter ausreicht.
{kind=link}
Geliefert wird ein Gehäuse mit einer Platine und zwei SMD-Bauteilsätzen – der Eine ergibt zusammen mit dem PCB die rotierende Plattform. Die zugehörige CPU ist per Klebestreifen auf dem PCB befestigt, in meinem Fall jedoch gedreht – blindes Loslöten sollte man also vermeiden. Der Inhalt der zweiten Bauteiltüte muss anhand des Schaltplans zum Oszillator für die Spule im Fuß des Gerätes zusammengesetzt werden. Eine Schematische Zeichnung der fertigen Platine dient hierbei, zusammen mit einigen Fotos in der Artikelbeschreibung, als Aufbauanleitung. Als sehr hilfreich für den Aufbau erwies sich auch das Video vom Kollegen „VoltLog (EN)“, welcher sich vor knapp einem Jahr ebenfalls am Aufbau versuchte.
Das Löten der Platine selbst geht, dank guter Qualität der Lötstoppmaske, recht schnell von der Hand. Der untere Teil ist perforiert und wird am Ende herausgebrochen und zur „3D-Struktur“ zusammengesetzt. Das Löten der 32 LEDs auf die Platinenkante ist etwas trickreich, ging jedoch nach einigen Versuchen schneller als erwartet.
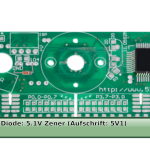
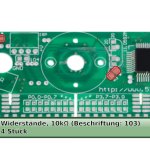
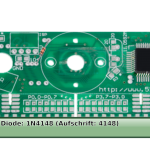
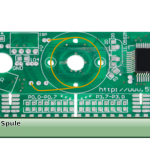
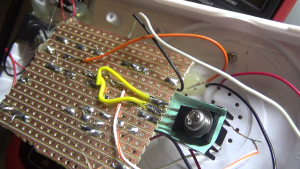
Bild: https://www.adlerweb.info/blog/wp-content/uploads/2016/06/still-osc-300×169.pngDer Oszillator, welcher sich am Ende im unteren Gehäuse befindet, muss, wie erwähnt, selbst aus dem Schaltplan abgeleitet werden. Da die Anzahl der Bauteile überschaubar ist sollte dies auch per „Flugverdrahtung“ möglich sein. Ich habe mich für die Nutzung eines Reststücks Streifenrasterplatine entschieden. Da der Lasttransistor die Betriebsspannung sozusagen über die Spule kurzschließt sollte er gut gekühlt werden. Ich verwende eine kleine „Fahne“, für TO220-Gehäuse – diese ist jedoch etwas unterdimensioniert und wird bei längerem Betrieb unangenehm heiß. In meinem Fall war eine Spannung von mindestens 5.5V notwendig um eine ausreichende Übertragung zum Rotor zu schaffen.
{kind=link}
Auf Prozessorseite wird die 8051-basierte CPU ohne jeglichen Inhalt ausgeliefert. Glücklicherweise hat das verwendete Modell einen seriellen Bootloader, sodass kein Spezieller programmer benötigt wird. Die Schnittstelle ist auf einen Pin-Header herausgeführt und arbeitet mit 5V TTL – die üblichen Wandler aus dem Arduino-Umfeld lassen sich also auch hier verwenden. Bei der nicht vorhandenen Software hat Technik-Blogger „Ceptimus“ großartige Pionierarbeit geleistet. In mehreren Artikeln (1, 2, 3) beschreibt er den Aufbau und die Funktionsweise seiner Software inklusive der verwendeten Fonts, Timer und sonstigen Entscheidungen. Weiterhin stellt er im Ursprungspost gleich eine fertig kompilierte Hex-Datei zur Verfügung. Sehr praktisch, denn der Code ist ohne Änderung nur mit kommerziellen Compilern nutzbar, sodass Anpassungen wie z.B. DCF77 oder NTP etwas mehr Arbeit erfordern würden.
Ich selbst habe zur Anpassung des Textes direkt in seiner iHex-Datei die ASCII-Zeichen geändert. Der Block mit der unteren Textzeile ist durch die vielen Leerzeichen (0x20) am Beginn einfach zu finden. Zu beachten ist, dass das iHex-Format als letzten Hex-Wert jeder Zeile eine Prüfsumme speichert, bei Modifikationen muss also auch diese angepasst werden. Ich habe hierzu ein kurzes PHP-Script gebastelt, welches die Datei prüft und alle inkorrekten Prüfsummen neu erstellt. Benutzung natürlich auf eigene Gefahr.
<?php
$file=file('in.hex');
foreach($file as $line) {
if(preg_match('/^:(([0-9A-F]{8})([0-9A-F]*))([0-9A-F]{2})$/', $line, $match)) {
$check = 0x00;
for($i=0; $i<strlen($match[1]); $i+=2) {
$check += hexdec($match[1]{$i}.$match[1]{($i+1)});
}
$check ^= 0xFF;
$check += 0x01;
$check &= 0xFF;
if($match[4] == str_pad(strtoupper(dechex($check)), 2, '0', STR_PAD_LEFT)) {
$out[] = $line;
}else{
echo "CHECKSUM! O:".$match[4]." N:".str_pad(strtoupper(dechex($check)), 2, '0', STR_PAD_LEFT)." - ".$line."\n";
$out[] = ':'.$match[1].str_pad(strtoupper(dechex($check)), 2, '0', STR_PAD_LEFT)."\n";
}
}else{
echo 'SKIP: '.$line."\n";
$out[]=$line;
}
}
$fh = fopen('out.hex', 'w');
foreach($out as $line) fwrite($fh, $line);
fclose($fh);
?>
Für das Programmieren steht mit stc-isp eine Linux-Software bereit, Ceptimus hat zudem eine GUI-Variante für Windows entwickelt. Da der Chip nur wenige Sekunden nach dem Einschalten Programme entgegennimmt muss die Stromversorgung im passenden Moment eingeschaltet werden. Beide Programme bieten hierzu eine passende Anzeige. Im Post zur Windows-Variante gibt es zudem einen Sketch, mit dem ein Arduino diese Aufgabe automatisch erledigen kann. In meinem Fall war es nötig einen Pull-Up (~22k?) zwischen TxD und Vcc des POV-Boards zu schalten um eine Stabile Verbindung zu erzeugen.
Auf Schaltungsseite ist die Ansteuerung der LEDs schnell erklärt: Alle hängen mit der Kathode über einen Widerstand direkt an den IO-Pins des Prozessors. Jeder der vier Blöcke mit acht LEDs entspricht hierbei einem Port, welches die Ansteuerung sehr effizient gestalten lässt. Weiterhin wird Pin6, welcher dem externen Interrupt 2 entspricht und über einen Widerstand auf Vcc gehalten wird, über eine IR-Diode bei passieren der zugehörigen LED im Fuß auf GND gezogen. Hierüber kann die Software feststellen wann eine Drehung vollständig ist und so trotz variierender Motordrehzahl das Timing entsprechend angleichen. Die Stromversorgung erfolgt über die Spule, welche eine 1N4148 als Einweggleichrichter nutzt. Die hierdurch entstehenden Unterbrechungen fängt ein Elektrolytkondensator ab. Um die CPU vor Überspannung zu schützen ist zudem eine Zener-Diode mit 5.1V über die Versorgung geschaltet, sodass höhere Spannungen über diese abgeleitet werden können.
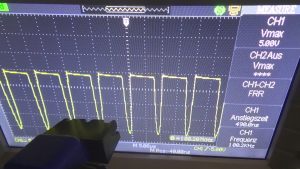
Bild: https://www.adlerweb.info/blog/wp-content/uploads/2016/06/coilfreq-300×169.jpgIm Fuß sind IR-LED und Motor direkt mit der Stromversorgung verbunden. Eine weitere Logik auf Transistoren und Widerständen bilden einen Oszillator, welcher die Spule regelmäßig über die Versorgungsspannung „kurzschließt“ um das notwendige Magnetfeld zu erzeugen.
{kind=link}
Alles in Allem ein eher anspruchsvolles Kit, welches Dank der großartigen Vorarbeit von Ceptimus und VoltLog für geübte Bastler jedoch trotzdem an einem Wochenende fertigzustellen ist. Die geringen Vorgaben bringen hierbei enorme Freiheiten eigene Ideen zu Implementieren, jedoch auch die Pflicht einiges an Eigenleistung einzubringen. Einsteiger und Ungeduldige dürften mit anderen Kits, welche in einigen Wochen ebenfalls zu sehen sein werden, eher Glücklich werden – müssen dafür jedoch auch tiefer in die Tasche greifen. Wer die Herausforderung annimmt kann am Ende mit einem interessanten Blickfang seine Bastelkünste zur Schau stellen.
Inhalt:
- 00:00 Was ist POV / Bauteile
- 06:00 Aufbau des Bausatzes
- 30:38 Software & Programmierung
- 39:17 Funktionsweise der Schaltung
2 Kommentare zu „BitBastelei #201 – Rotating LED POV Kit“