BitBasics - ESP8266 - 1a2: Windows-Treiber für Arduino-Boards finden (NodeMCU, Wemos, ProMini,…)
(49.2 MB) 00:06:20
2018-02-25 12:00
🛈Einen Arduino unter Windows zu betreiben ist meist ganz einfach: Einstecken und los geht es – zumindest beim Original. Wer andere Boards wie den ESP8266 oder eines der vielen Arduino-Nachbauten verwenden möchte wird oft auf das Problem stoßen, dass Windows die nötigen Treiber nicht automatisch finden kann. In diesem Video zeige ich wie man den zuständigen USB-Controller des Boards findet, wo man passende Treiber herbekommt und wie man die bekanntesten installiert.
Treiber-Links
BitBasics - ESP8266 - 1b: Arduino Installation und Einrichtung unter Linux
(34.1 MB) 00:09:03
2018-02-25 11:30
🛈Um mit dem ESP8266 zu starten benötigen wir eine Programmierumgebung. In meiner Serie werde ich auf Arduino aufbauen, eine der verbreitetsten Systeme für den ESP und viele andere Mikrocontroller. In diesem Video zeige ich die Installation der Arduino-Umgebung und der nötigen Zusätze für den ESP8266 unter Ubuntu Linux. Weiterhin gebe ich einige Tipps, wie die Einrichtung auch unter anderen Linux-Distributionen funktionieren sollte.
Links:
BitBasics - ESP8266 - 1a1: Arduino Installation und Einrichtung unter Windows
(40.4 MB) 00:06:08
2018-02-25 11:00
🛈Um mit dem ESP8266 zu starten benötigen wir eine Programmierumgebung. In meiner Serie werde ich auf Arduino aufbauen, eine der verbreitetsten Systeme für den ESP und viele andere Mikrocontroller. In diesem Video zeige ich die Installation der Arduino-Umgebung und der nötigen Zusätze für den ESP8266 unter Windows.
Links:
BitBastelei #273 - DIY Vernetzte Rauchmelder - Part 1
(318.2 MB) 00:34:26
2018-02-18 11:00
🛈Immer Batterie leer, Keiner bekommt Alarme mit und getestet wird ohnehin nie – auch wenn Heimrauchmelder einen wichtigen Job zu erfüllen haben, so hat die Umsetzung doch in vielen Fällen ziemliche Lücken und Nachteile. Für ein paar abgelegene Räume, die nur als Lager genutzt werden, soll jetzt hier etwas praktischeres her.
Links
BitBastelei #272 - Arduino als PIC-Programmiergerät
(329.5 MB) 00:18:11
2018-02-11 11:00
🛈AVR vs. PIC – früher eine Relegionsfrage der beiden Mikrocontroller-Communities, heute nur noch selten relevant. Es sei denn, man bekommt als AVR-Mensch einen PIC-Controller vor die Nase und hat kein passendes Programiergerät.
Links zum Thema
BitBasics - ESP8266 - 0: Einführung
(72.3 MB) 00:09:53
2018-02-04 11:00
🛈In dieser Serie werden wir und mit den Grundlagen rund um Arduino und den ESP8266 beschäftigen. Mit dieser Kombination kann man auch als Einsteiger schnell mächtige Mikrocontrollerprojekte umsetzen – egal ob blinkende LED oder IoT-Gerät.
In der Einführung spreche ich kurz über die geplanten Themen und die Unterschiede zwischen dem ESP8266 und den klassischen Arduino-Boards.
—
Korrekturen
- 02:05 AVR war die Serie, der Hersteller hieß Atmel
—
Serie
—
Hardware
—
Links:
BitBastelei #271 - Lenovo Carbon X1 3rd Scharnier-Reparatur
(512.6 MB) 00:48:30
2018-01-28 11:00
🛈Knack, krach, wackel. Bei einem älteren Laptop ist der Scharnier gebrochen, der Support hat keine zufriedenstellende Lösung zur Hand. Dann besorgen wir mal Ersatzteile aus feinstem Chinesium und schauen, was wir so ausrichten können.
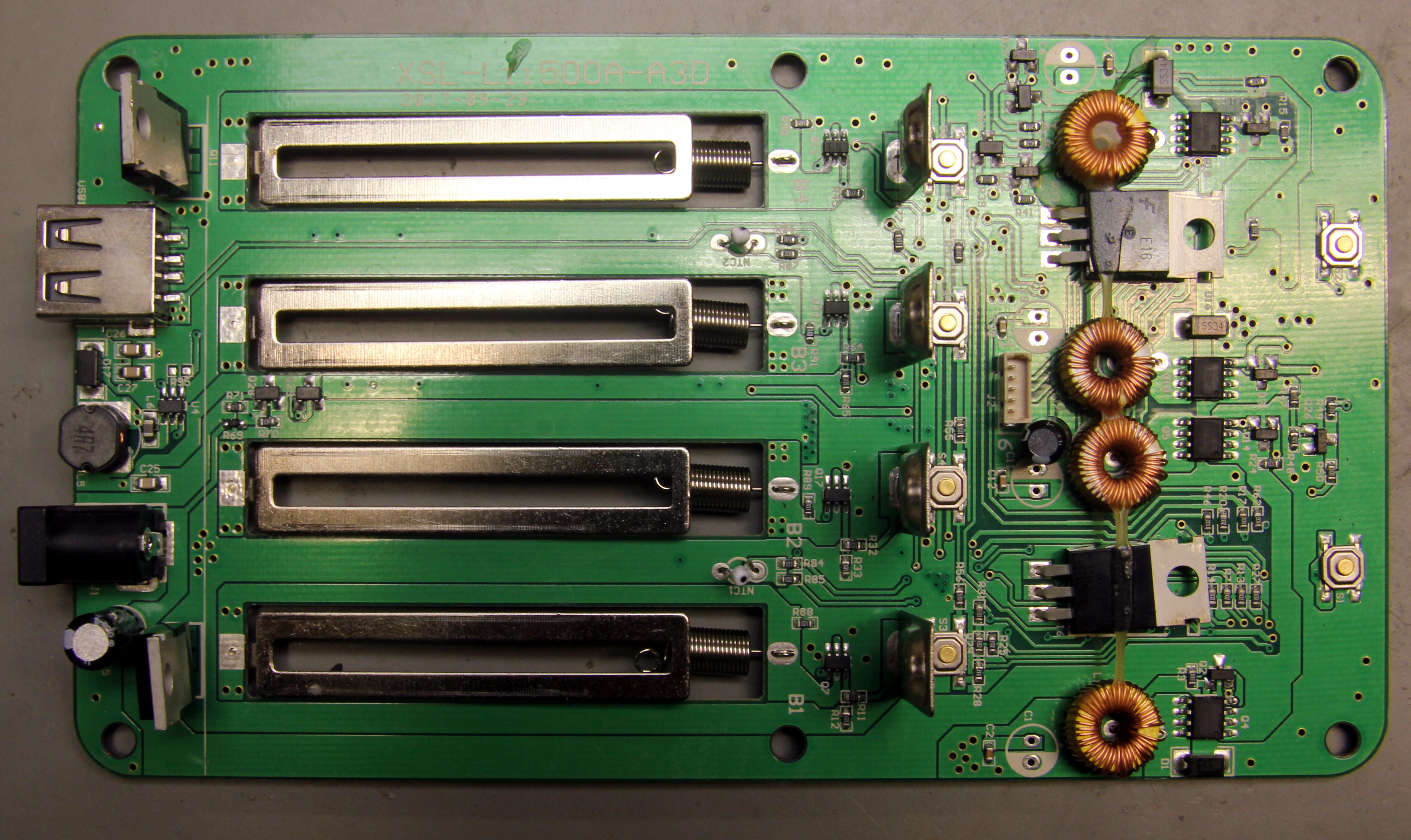
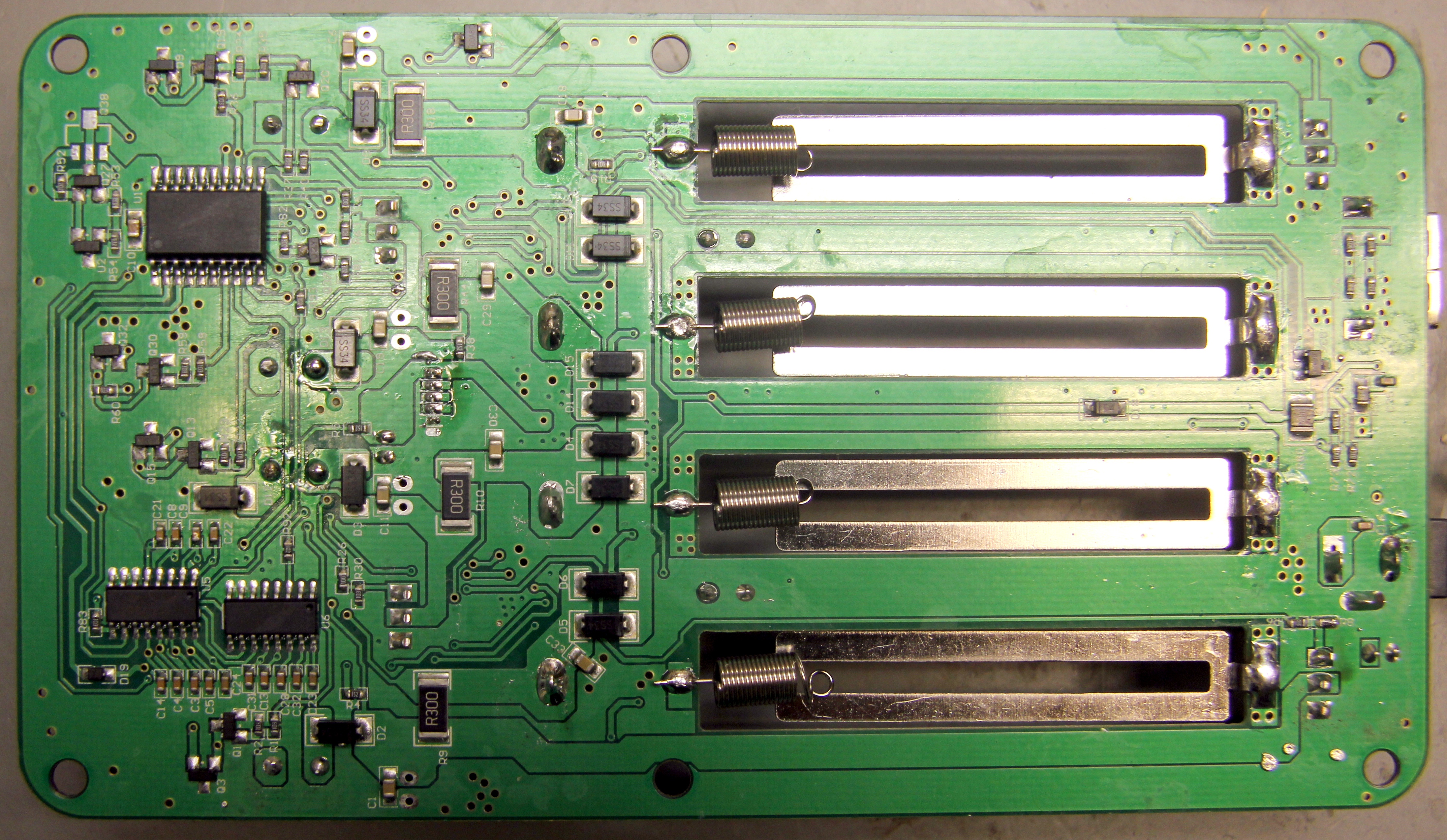
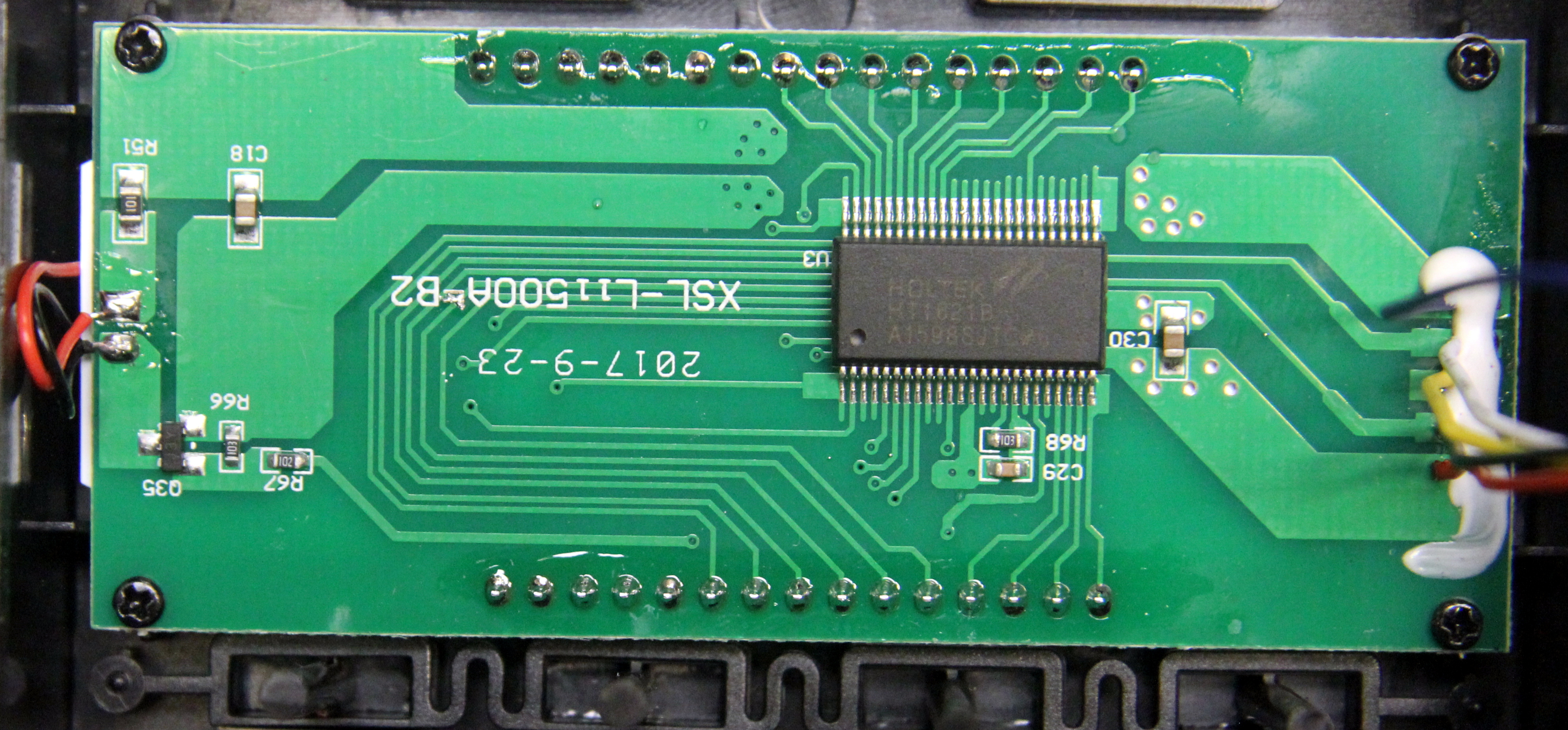
BitBastelei #270 - Lii-500 Batterieladegerät (18650, Ni-HM, etc)
(347.6 MB) 00:18:21
2018-01-21 11:00
🛈Ich nutze häufig Li-Ion-Akkus der Bauform 18650 – egal ob Eigenbau-Powerbank, Taschenlampe oder mobile Sensoren, die Zellen sind recht praktisch. Viele dieser Zellen sind nicht neu, sondern aus alten Laptop-Akkus entnommen. Dessen Funktion zu testen ist mit dem bisherigen Imax B6 etwas mühsam – die Einstellungen müssen manuell vorgenommen werden, zudem kann immer nur eine Zelle getestet werden. Abhilfe verspricht der Lii-500. Dieser hat 4 unabhängige Schächte und kann Li-Ion und NI-MH-Zellen unabhängig voneinander Laden und Testen. Da ich ihn für grade mal 10€ bei einem Fernost-Shopping-Festival (*) aufgegriffen habe sicher ein Versuch wert.
Korrekturen
- 07:32 1.3Ah natürlich, nicht mAh
BitBastelei #269 - Vom Schrott-Monitor zur Lampe
(158.6 MB) 00:17:50
2018-01-14 11:00
🛈Alte oder Kaputte Flachbildschirme in den Schrott? Nicht so schnell: Mit ein paar Handgriffen lassen sich diese Geräte in eine nützliche Lampe umwandeln.
BitBastelei #268 - USV Wandlermodul
(247.1 MB) 00:23:07
2018-01-07 11:00
🛈Da war ja was. Vor langer Zeit hatte ich mal Teile einer defekten Groß-USV anschauen können. Also ziehen wir das Ding nochmal hervor und schauen, was in einem solchen Modul steckt.
Zum Aufbau: Das gezeigte Modul enthält Gleich- und Wechselrichter, PFC, DC-DC-Booster sowie die Ladeelektronik und ist für bis zu 3.5kVA Dauerlast ausgelegt (also 3.5kVA Eingang und 3.5kVA Ausgang). Die USV selbst bestand aus mehreren dieser Module im Hauptgehäuse sowie mehreren Batteriegehäusen. Es handelte sich um ein Doppelwandlersystem mit echtem Sinus.
08:45 Oops, falsche Einblendung
11:35 Ich hab keine Ahnung was ich da rede…